OmniSlam RTK-SLAM laser panoramic mapping robot
——R8 is new online
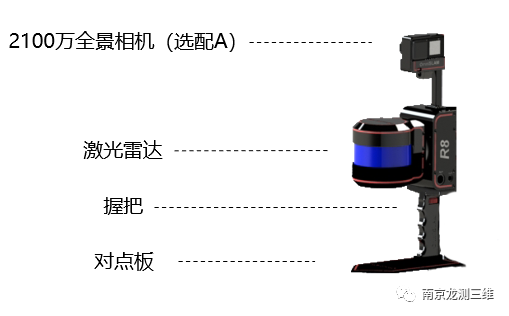
▲handheld

▲Knapsack type
Optional A: Panoramic picture with position and attitude information, pixel level true color point cloud.
Option B: Can automatically obtain the point cloud in the absolute coordinate system. For example, CGCS2000 can automatically adjust.
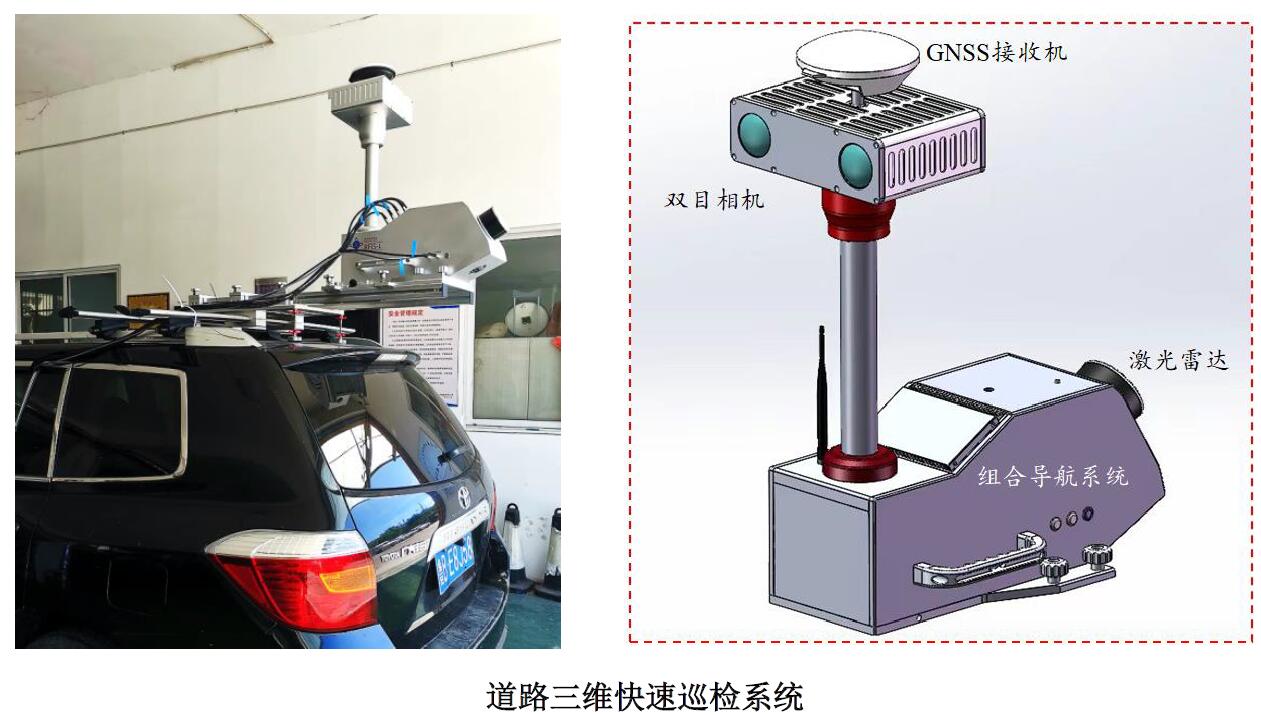
Single Lidar rotary mobile scanning product R8 is a portable three-dimensional point cloud data acquisition tool with high cost performance. The product can be integrated with the lidar of 16-line 120 meters, 32-line 120 meters or 32-line 300 meters. It can scan the three-dimensional structure of space by rotating 360 degrees. It adopts the modular design concept and can be equipped with additional functional modules such as panoramic camera and GNSS. With flexible structure design and optimized SLAM algorithm, the product explains the advantages of single Lidar in acquiring three-dimensional spatial structure data.

Product characteristics
Lidar scans space structures in a 360-degree rotation
A point cloud model that displays the current scene in real time on mobile phones
A terabyte solid state drive can operate for eight hours without interruption
It supports various modes of operation, including hand-held, saddle-mounted and vehicle-mounted
The data format is used internationally to meet various needs
Lithium-ion batteries adapted for general use are suitable for long-term operations
There are many applications such as laneways, pipes, trees and buildings
Mobile phones monitor the operating status of devices in real time and control the operation process
The device is simple in structure, easy to operate and easy to learn
It is equipped with data processing software with its own intellectual property rights
The result is data such as point cloud, location, posture and image
RTK implementations such as Chihiro Location and CORS station are supported
A backpack rack is a standard accessory that eases the burden of self-production
Batch processing allows computers to run 24 hours a day
It takes five minutes to learn how to use software and solve data without human intervention
Seven parameters can be imported to obtain point cloud data of the local coordinate system
Rotary lidar
OmniSlam Intelligent redefines the scanning mode, combines the motor with the laser radar. The motor drives the laser radar to rotate clockwise, scanning the spatial structure 360 degrees without dead corners, and independently develops the rotating point cloud stitching algorithm.
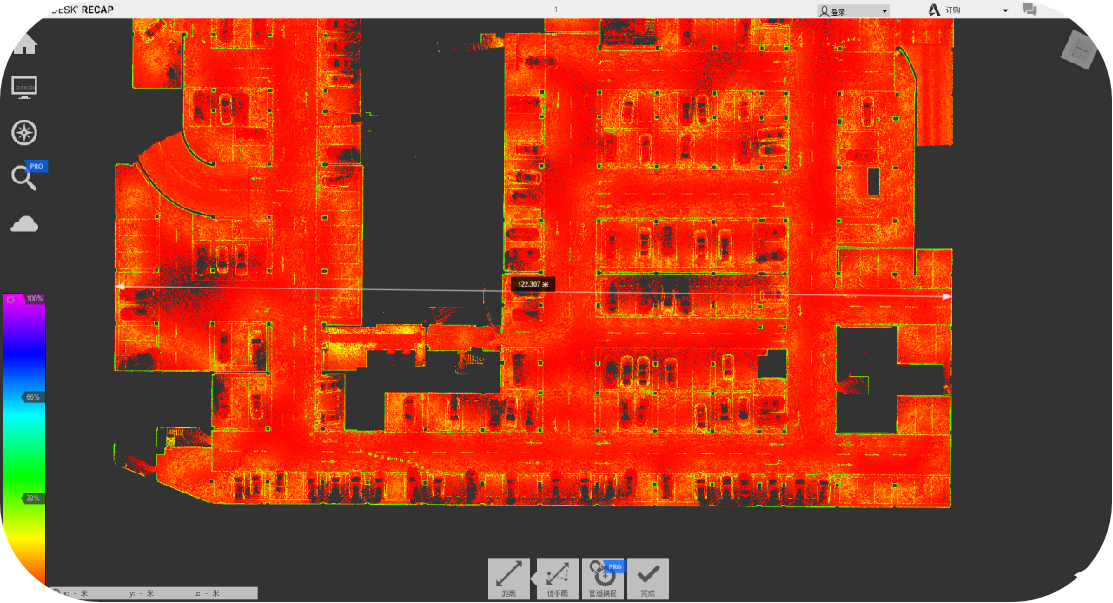
Precise intensity information point cloud
The R8 model independently developed by OmniSlam supports point clouds whose intensity information is accurate and clear within 10mm. Users can draw the result map according to the intensity information of point clouds.
Duration Duration of continuous power collection
R8 A single continuous power collection duration of 90 minutes. The R8 was able to capture nearly 300,000 square meters in a single 90-minute operation.
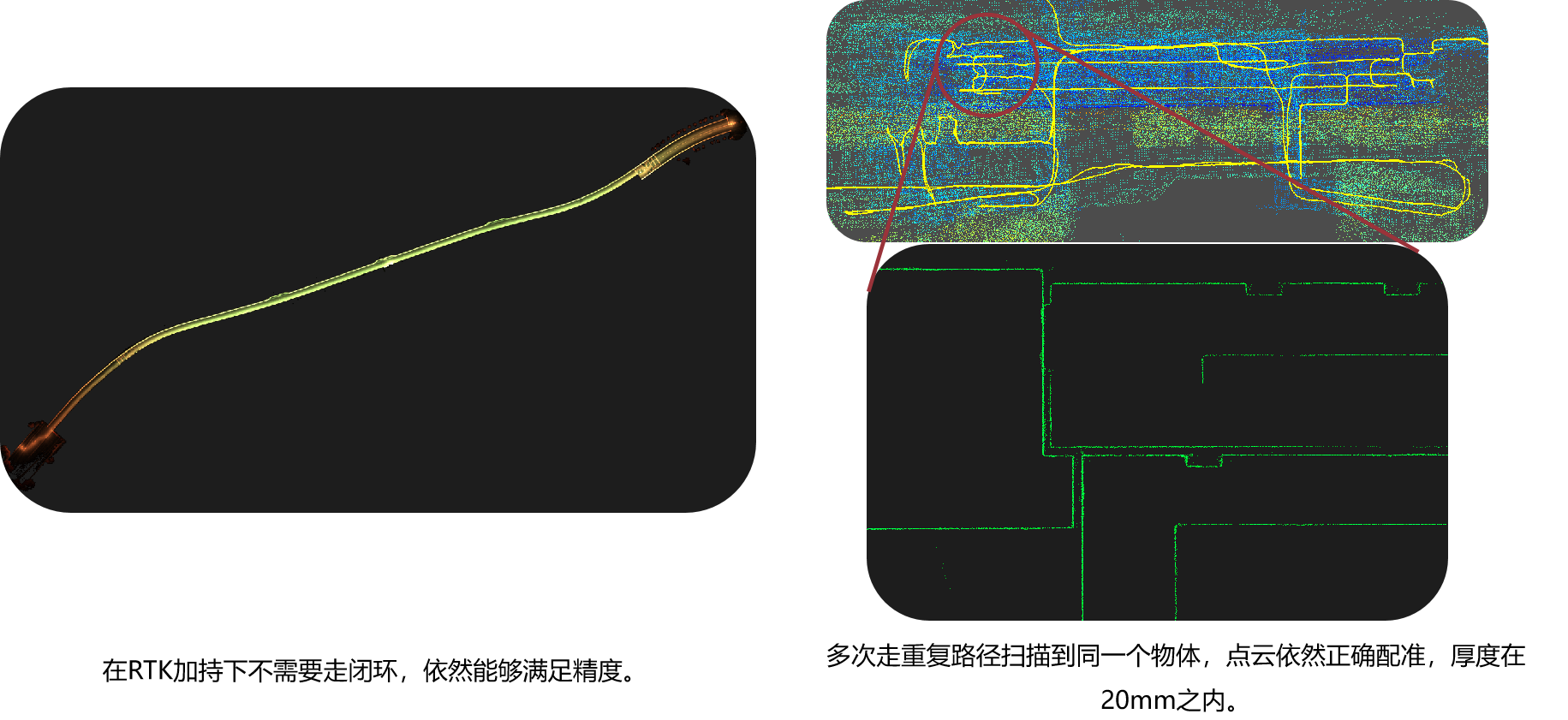
You don't need to close the loop to walk the repetitive path
R8 does not need to go through the closed loop under the support of RTK, and can plan the operation route freely. In any environment, the same object can be scanned multiple times. Point cloud is not stratified.
Relative accuracy
The relative accuracy is meaningful only when the distance is longer than the effective distance of the lidar. After a long time of feature registration, the relative relation of the object can be measured. The relative accuracy of point clouds obtained by R8 over 100m intervals is less than ±10mm.
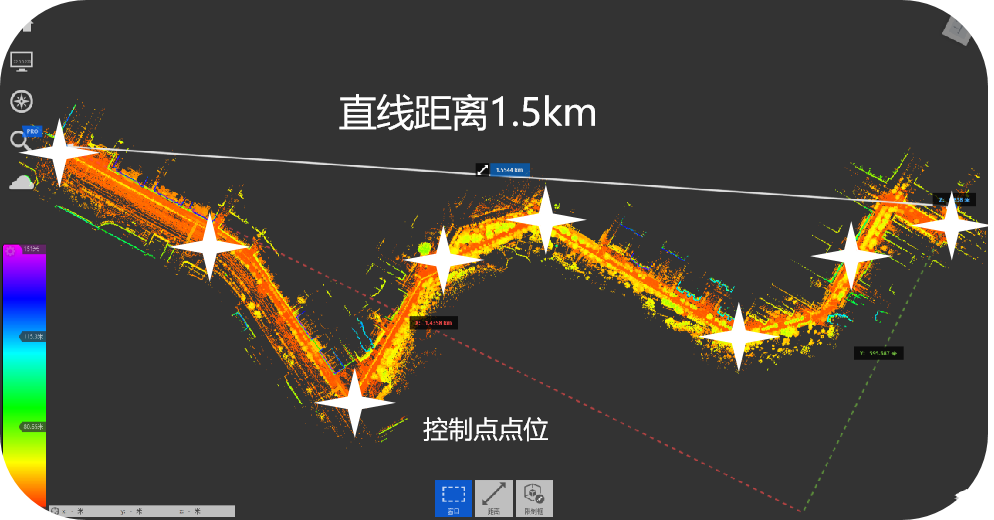
Absolute accuracy
The R8 measurement area is more than 50,000 square meters, the spacing of test points is more than 100m, and the accuracy of point cloud in CGCS2000 coordinate system is less than 30mm.
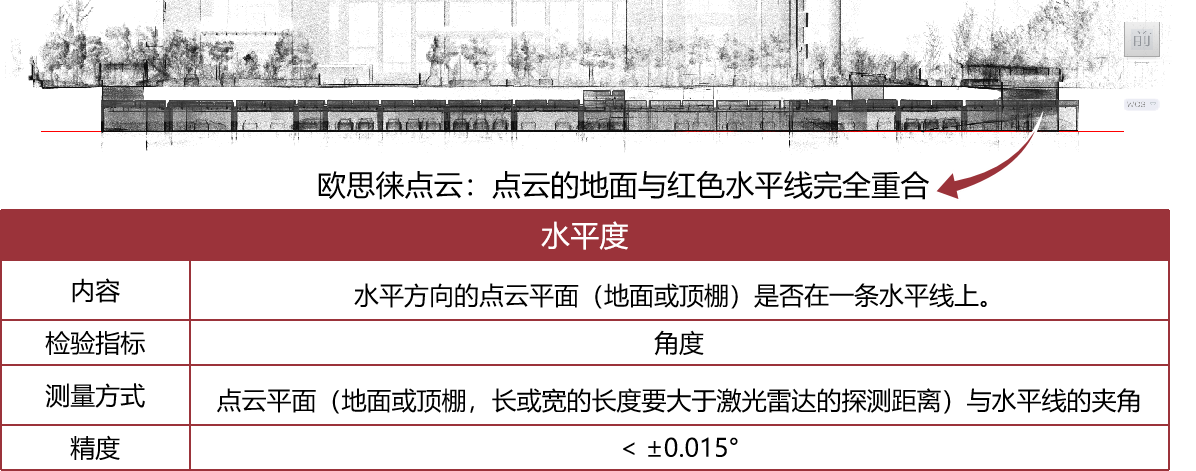
Accuracy of levelness
The point cloud obtained by R8 has extremely high levelness with a levelness accuracy of less than 0.015 degrees.
Verticality accuracy
The point cloud obtained by R8 has extremely high verticality, and the verticality accuracy is less than 0.015 degrees.
Point cloud thickness accuracy
The thickness of the unfiltered original point cloud obtained by R8 is less than 20mm, and extremely narrow point cloud thickness with consistency can be obtained no matter the scenes scanned are buildings, roads, forests, mine piles, mine paths, etc.
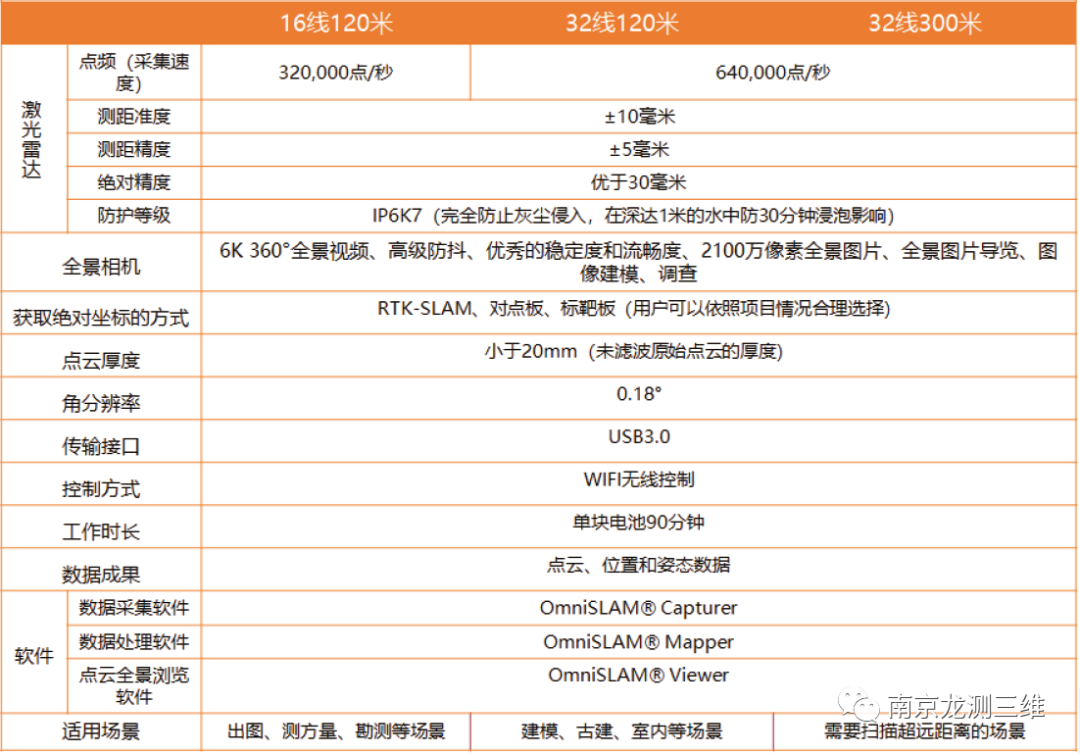
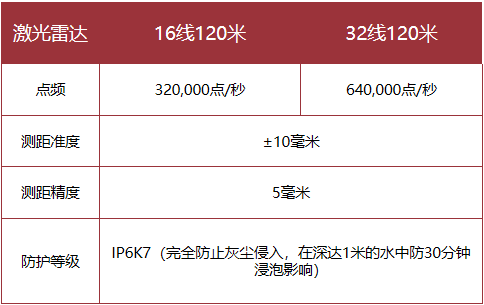
 Technical parameter
Technical parameter
 ∷
∷ 















 Sweep WeChat yards pay attention to us
Sweep WeChat yards pay attention to us